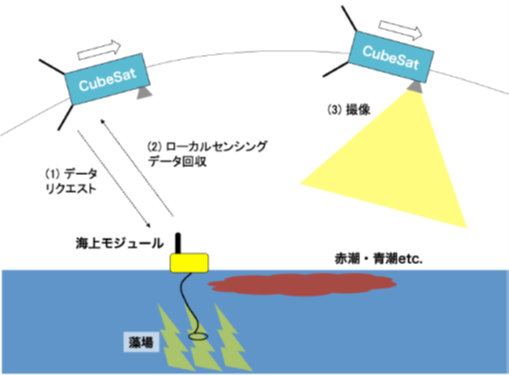
海の豊かさを知る一環で行う地球観測衛星データによる藻場識別解析へ活かすため、対象沿岸域・藻場に、設置した海上モジュール(各種センサ、GPS受信機、S&F通信機、電源を備えたブイ)で平常時は気温、海水温、塩分濃度、濁り度などのデータと、位置情報を取得しロギングする。海上モジュールは衛星からのデータリクエスト信号に反応し、S&F通信で位置情報と取得データを送信する。衛星はデータ受信後、観測対象方向を狙って海域撮像を行う。本ミッションでは、上記のプロセスによりグローバルに沿岸域・藻場のローカルデータ及び周辺海域画像を収集し、それらデータを地上局へ一括ダウンロードする。
概要
本ミッションの狙い
①海の豊かさを表すパラメータである藻場を地球観測衛星データから精度80%で識別できるように解析技術を向上
②上記で必要な海水温、塩分濃度、濁り度などのデータを活用することでグローバルに沿岸域の環境を知り、漁業と養殖を活性化
③グローバルに海のSDG’sを達成
実現のキーとなる要素技術
①陸域と海域の両方が存在する沿岸域観測に適した小型安価なマルチスペクトルカメラ
②海上モジュールに、免許不要の特定小電力無線(LoRa通信機等)を使う。衛星側でそれとデータ通信できる通信技術及び衛星周回で収集する撮像データと海の状況データを地上局へ一括送信するS&F技術
衛星のスペック
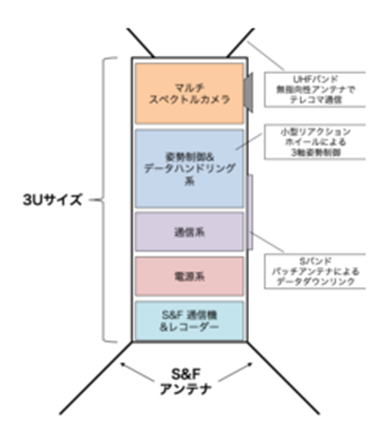
①3U衛星構造
②国際宇宙ステーション軌道へ投入
③バス機器は信頼性のあるCOTS品
④マルチスペクトルカメラ搭載
⑤海域の任意の方向を向いての撮像を実現する3軸姿勢制御
⑥特定小電力無線からのデータ通信をグローバルに実現するS&F通信機とSバンド通信機
衛星のイメージ図
ミッションのイメージ図
開発状況・計画
基本設計として以下を終了
①制約条件とミッションを実現させる設計要求明確化
②衛星システム設計
③構成コンポーネントの選定
今後は、艤装設計、OBS設計・製造、地上局検討及び基本設計モデルからフライトモデルまでの試験を4年で完了させる計画
ミッションや技術詳細
(1)ミッション系
ミッション系は、マルチスペクトルカメラと海上モジュールのLoRaとミッションデータ通信を行うS&F通信機で構成する。
① マルチスペクトルカメラ
マルチスペクトルカメラはGomSpace社NanoCam C1Uを採用する。本カメラはRGBのみ撮像するもので近赤外などは含まない。特殊な波長も撮れるCOTS品カメラでGomSpace社システムとPlug-and-Playできるものは存在しない。NanoCam C1Uは、要件に基づきカスタマイズされたイメージングシステムを迅速に実装できるモジュール式でレンズ、レンズテーブル、画像処理ボード及びソフトウェアで構成している。GomSpaceのOBC、姿勢制御系、通信系、電源系と共に1U 構造でも実装できる設計で、本ミッションとして低コストで藻場・沿岸域観測が可能である。
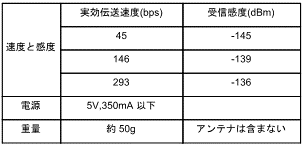
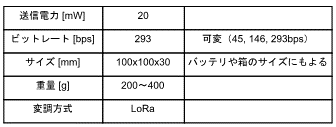
② S&F通信機
LoRaの送受信機及びアンテナは衛星側受信機、海上側送信機それぞれ、東京大学が開発し、2018年2月3日に打上げたTRICOM-1Rを想定している。 諸元を右表に示す。基本設計として通信回線マージン解析を行った。投入軌道高度を500km、通信距離も同じとして特定小電力無線帯の電力上限の20mw、ビットレートを 100bpsと仮定した解析で回線マージン6.3dBで成立している。 これは、東京大学の軌道実績と照合してある。
(2)バス系
ミッションを実現させるシステム設計を終えて、GomSpace社製品で通信系、データ処理系、姿勢制御系及び電源系のコンポーネントを選定してある。それに基づいて信号系と電源系についてシステムダイアグラムを作成し、PC104をコアとするインタフェースも明確にした。またGomSpace社製のGOMX-3が本衛星と似た機器配置を持ちISS軌道で成立していることから、電力収支が成立する見込みもある。オーダーとして、ノミナル運用時、日照時6Wの発電を行いながら、日陰時2.5Wの電力消費を続けることになる。周回90分のうち、50分間はこの差分の最大3.5Wで日照中充電可能でマージンが正となる。
参考文献など
[1] 松本 健, (東京大学)
「TRICOM-1R(たすき)における LoRa を用いた Store and Forward ミッションの軌道上実証結果」
『第62回宇宙科学技術連合講演会, 論文番号 1F13(2018)』
動画
講演資料
※無断配付・二次利用厳禁